See what you can build with Rerun
A tour of Rerun in action: live recordings, code, and walkthroughs across robotics, computer vision, and machine learning.
Spatial computing & XR
Reason about the physical world in 3D
Fuse depth, meshes, calibrated cameras, and detections into a single scene you can scrub through frame by frame, from ARKit captures to multi-view reconstructions.
 Live
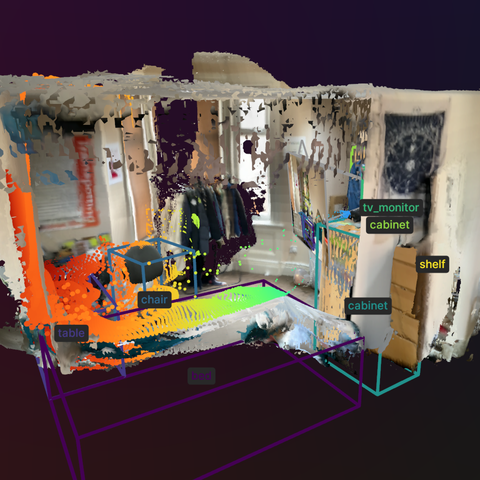
LiveARKit scenes
This example visualizes the ARKitScenes dataset using Rerun. The dataset contains color images, depth images, the reconstructed mesh, and labeled bounding boxes around furniture.
2D 3D Depth Mesh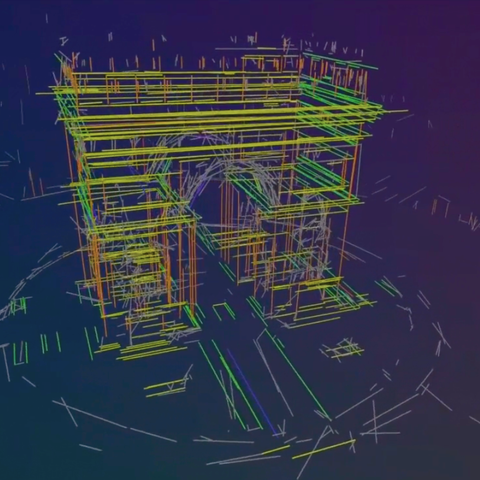
3D line mapping revisited
This example is a visual walkthrough of the paper "3D Line Mapping Revisited". All the visualizations were created by editing the original source code to log data with the Rerun SDK.
2D 3D Structure from motion Time series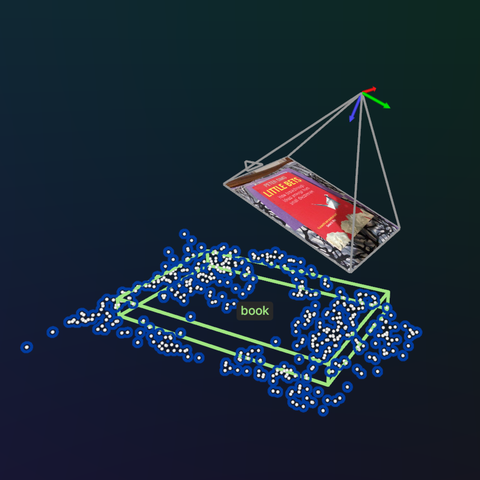
Objectron
Visualize the Google Research Objectron dataset including camera poses, sparse point-clouds and surfaces characterization.
2D 3D Object detection Pinhole camera
SimpleRecon: 3D reconstruction without 3D convolutions
This example is a visual walkthrough of the paper "SimpleRecon: 3D reconstruction without 3D convolutions". All the visualizations were created by editing the original source code to log data with the Rerun SDK.
3D Depth Time series Pinhole camera
Decoupling human and camera motion from videos in the wild
This example is a visual walkthrough of the paper “Decoupling Human and Camera Motion from Videos in the Wild”. All the visualizations were created by editing the original source code to log data with the Rerun SDK.
3D SLAM Keypoint detection Mesh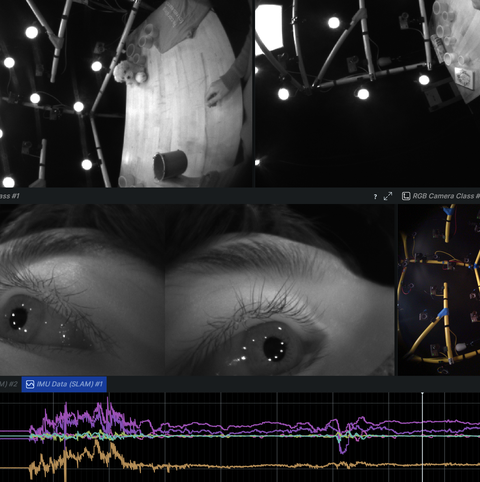
VRS viewer
This is an example that shows how to use Rerun's C++ API to log and view VRS files.
2D 3D VRS Viewer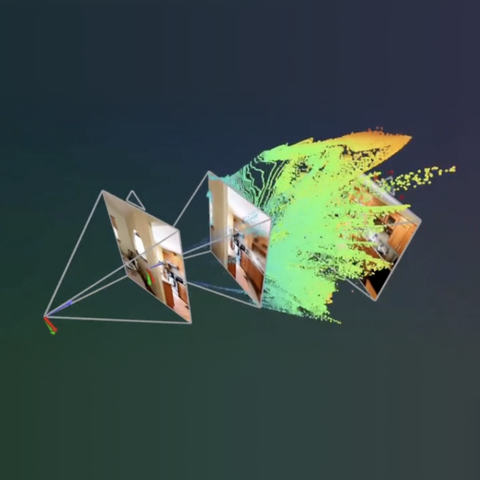
Learning to render novel views from wide-baseline stereo pairs
This example is a visual walkthrough of the paper "Learning to render novel views from wide-baseline stereo pairs". All the visualizations were created by editing the original source code to log data with the Rerun SDK.
2D 3D View synthesis Time series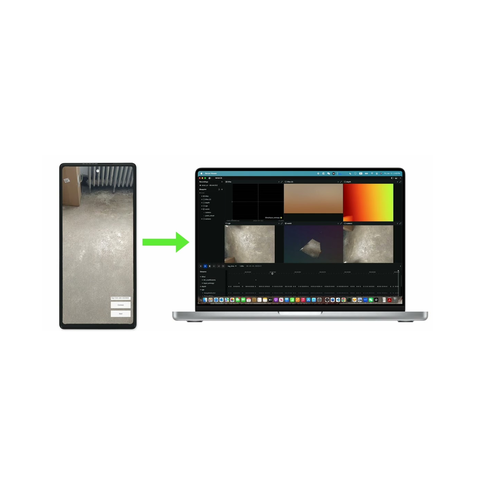
ARFlow: a framework for simplifying AR experimentation workflow
This is an external project that uses Rerun as a core component.
3D Augmented reality Spatial computing Integration
Robotics
Debug robots like you'd debug software
Log multi-rate sensor streams, joint states, controllers, and policies into one timeline. Replay a run, compare two, or watch one live as it happens.
 Live
LiveAny scalar
A 6-minute narrated walkthrough of using the Rerun UI to plot arbitrary scalar data from a dataset (MCAP) is available on Youtube.
Any scalar Plotting DynamicArchetype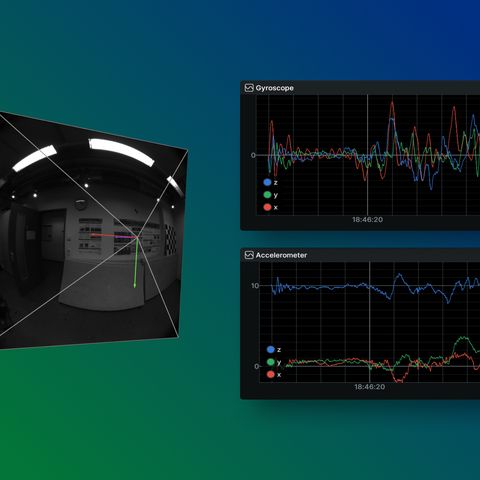 Live
LiveIMU signals
Log multi dimensional signals under a single entity.
Plots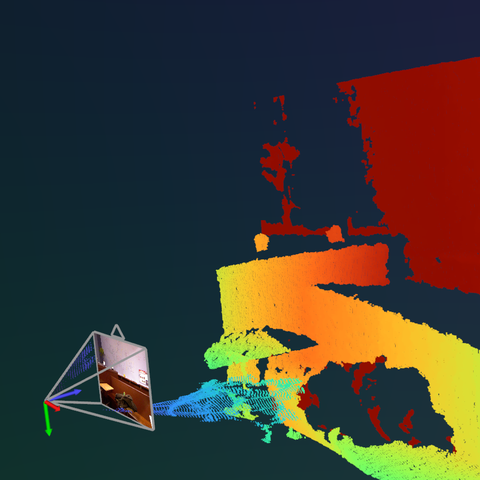 Live
LiveRGBD
Visualizes an example recording from the NYUD dataset with RGB and Depth channels.
2D 3D Depth NYUD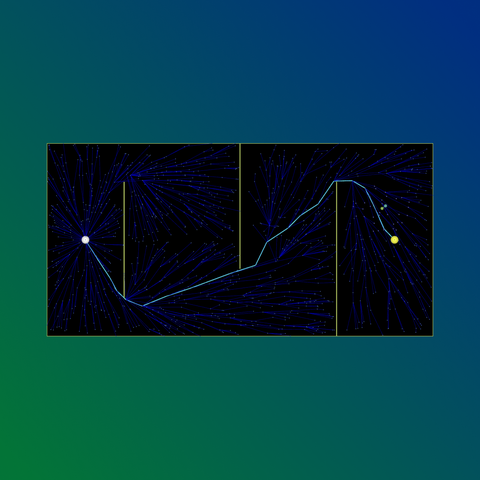 Live
LiveRRT*
This example visualizes the path finding algorithm RRT\* in a simple environment.
2D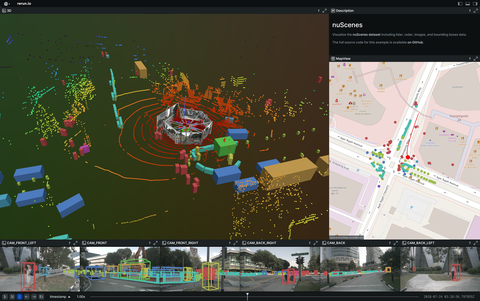 Live
LivenuScenes
Visualize the nuScenes dataset including lidar, radar, images, and bounding boxes data.
Lidar 3D 2D Object detection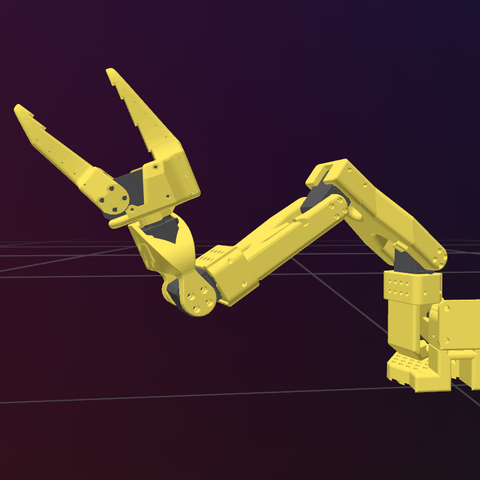 Live
LiveURDF
An example of how to load and animate a URDF given some changing joint angles.
3D Mesh URDF Animation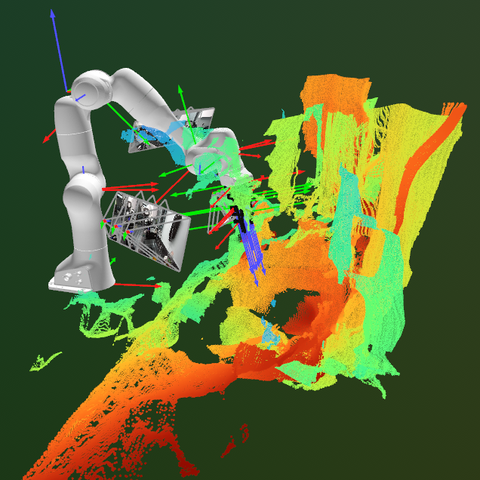
DROID
This example visualizes the DROID dataset.
2D 3D Depth Pinhole camera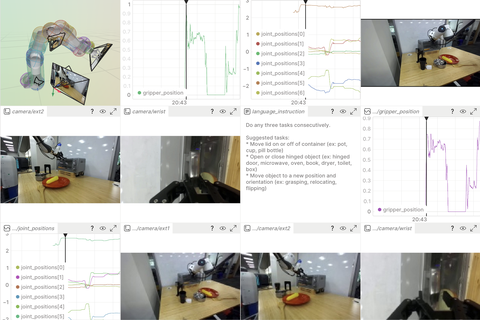
DROID semantic frame search
Find moments in robot demonstrations by describing them in plain language, and jump straight to the matching frame in the Rerun viewer.
Robotics Semantic search Embeddings SigLIP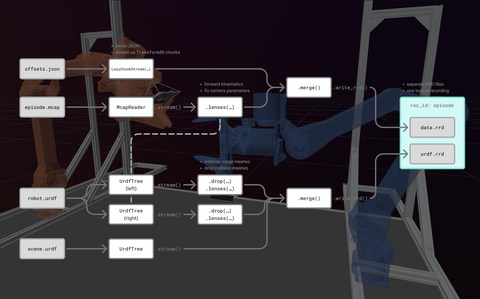
Robot data preprocessing example
This example demonstrates how Rerun's chunk processing API can be used to assemble a robot recording from multiple file sources, including preprocessing to modify or augment the data.
API example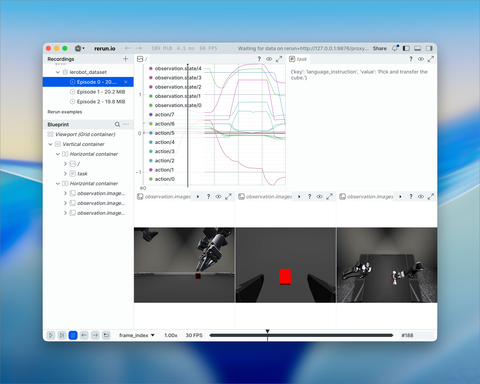
LeRobot dataset from RRD
Convert robot recordings into training-ready datasets by using the OSS Rerun server to query and transform RRD files into LeRobot v3 format.
Robotics MCAP LeRobot Dataset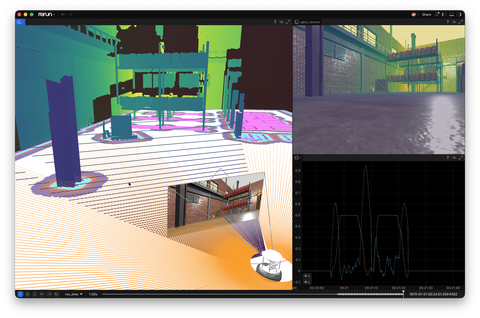
ROS node
A minimal example of creating a ROS node that subscribes to topics and converts the messages to Rerun log calls.
2D 3D Pinhole camera ROS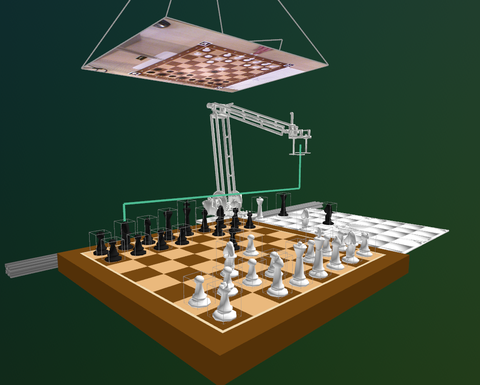
Robby fischer
Robby Fischer is an autonomous robot arm that you can play chess against, created by Alexander Berntsson and Herman Lauenstein. It detects the human's move by using a camera that watches which squares has a piece on it and what color that piece is. It doesn't need to see recognize different roles (pawn, rook, etc..) visually because it knows the start position so it can always figure out what piece stand on what square. However, this is a bit problematic if the human promotes a pawn because robot must figure out which piece the pawn was promoted to. This is why it also looks at the adjacent white board, where it has a specific location associated with each piece, so if the human promotes to a queen the queen square will be empty and Robby can figure out that the human promoted to a queen.
3D URDF Blueprint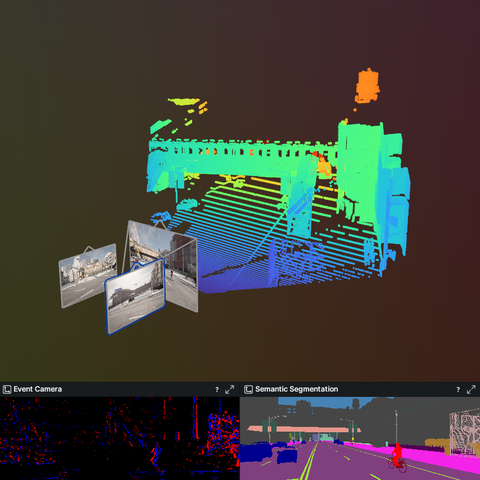
ROS 2 bridge
A proof-of-concept Rerun bridge for ROS 2 that subscribes to all supported topics and visualizes the messages in Rerun.
2D 3D Pinhole camera ROS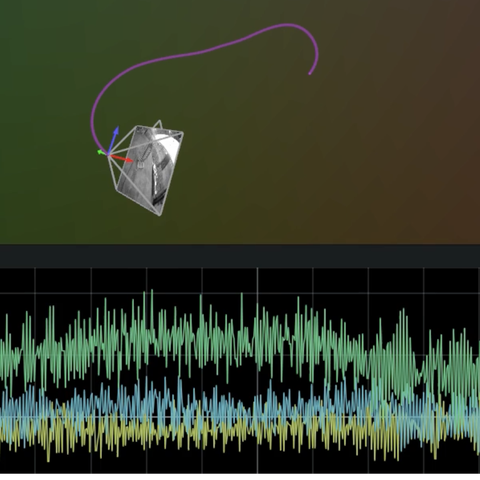
ROS bridge
A proof-of-concept Rerun bridge for ROS 1 that subscribes to all supported topics and visualizes the messages in Rerun.
2D 3D Mesh Pinhole camera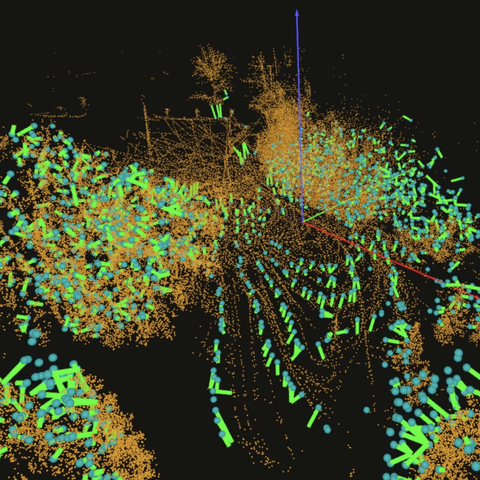
KISS-ICP
Visualizes the KISS-ICP LiDAR odometry pipeline on the NCLT dataset.
3D Point cloud Lidar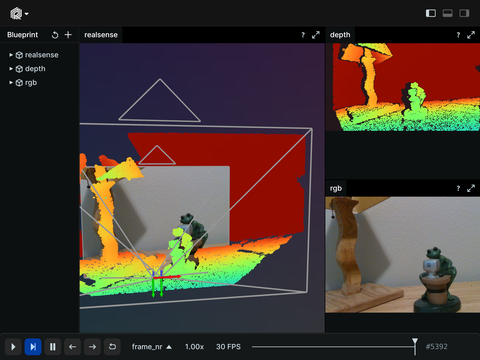
Live depth sensor
Visualize the live-streaming frames from an Intel RealSense depth sensor.
2D 3D Live Depth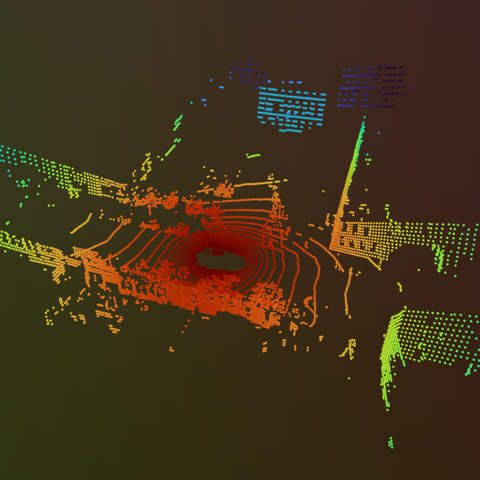
Lidar
Visualize the LiDAR data from the nuScenes dataset.
Lidar 3D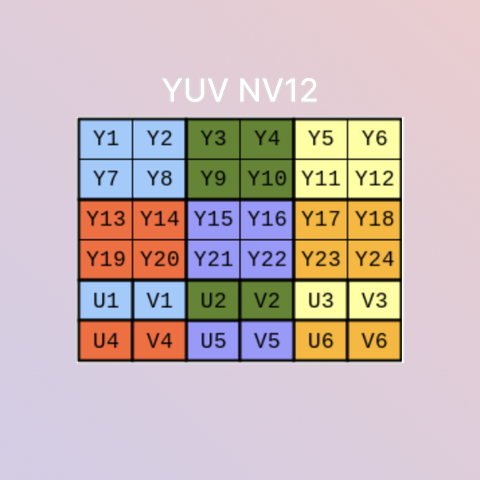
NV12
This example displays an NV12 encoded video stream from a webcam in rerun.
2D Image encoding YUV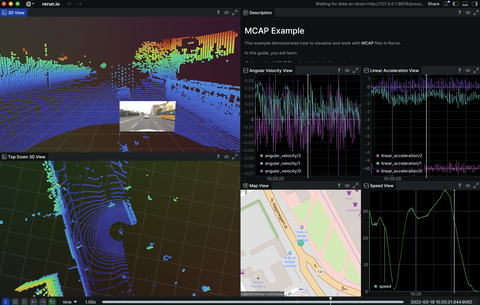
MCAP
This example demonstrates how to visualize and work with MCAP files in Rerun. From mcap.dev:
MCAP RRD ROS ROS 2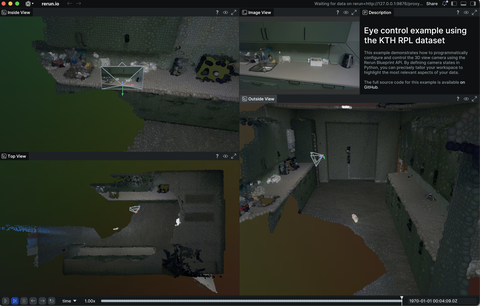
Eye control
This example demonstrates how to programmatically configure and control the 3D view camera using the Rerun Blueprint API. By defining camera states in Python, you can precisely tailor your workspace to highlight the most relevant aspects of your data.
Eye control 3D Pinhole camera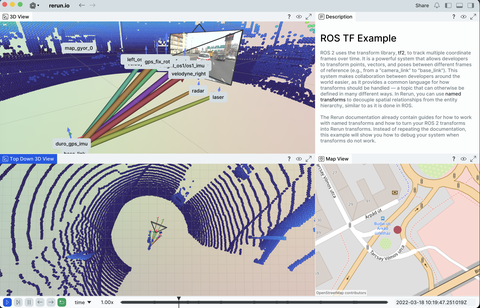
ROS TF
ROS 2 uses the transform library, tf2, to track multiple coordinate frames over time. It is a powerful system that allows developers to transform points, vectors, and poses between different frames of reference (e.g., from a "camera_link" to "base_link"). This system makes collaboration between developers around the world easier, as it provides a common language for how transforms should be handled — a topic that can otherwise be defined in many different ways. In Rerun, you can use named transforms to decouple spatial relationships from the entity hierarchy, similar to as it is done in ROS.
ROS TF Transform Coordinate Frame
ML & generative AI
Open the black box of your model
Visualize tensors, embeddings, diffusion intermediates, and end-to-end pipelines side-by-side. See what your model sees, at every step.

ControlNet
Use Hugging Face's ControlNet to generate an image from text, conditioned on detected edges from another image.
ControlNet Canny Hugging Face Stable diffusion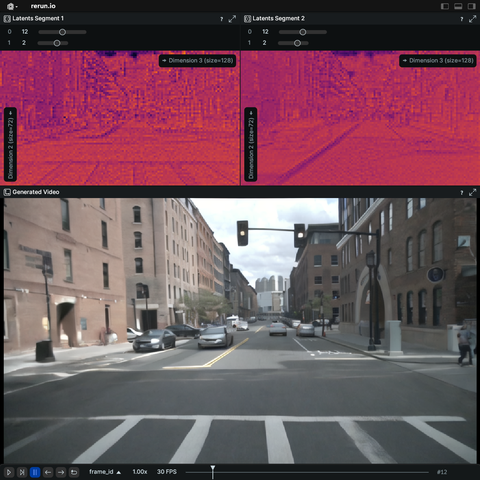
Vista driving world model
Vista is a generative driving world model. Built on Stable Video Diffusion it can generate driving scenes conditioned on a single input image and optional, additional control inputs. In this example we visualize the latent diffusion steps and the generated, decoded image sequence.
2D Diffusion HuggingFace Video
Single image 3D reconstruction using MCC, SAM, and ZoeDepth
This example project combines several popular computer vision methods and uses Rerun to visualize the results and how the pieces fit together.
2D 3D Segmentation Point cloud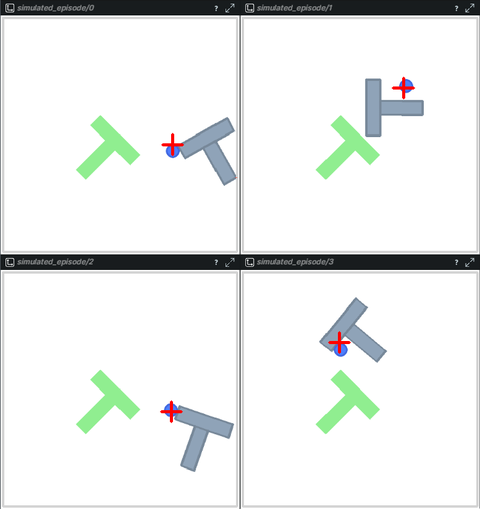
Training a model on the LeRobot dataset
LeRobot is a project by huggingface that aims to provide models, datasets and tools for real-world robotics in PyTorch. This example shows how one can train a model on the pusht-dataset and visualize it's progress using rerun.
2D HuggingFace Imitation learning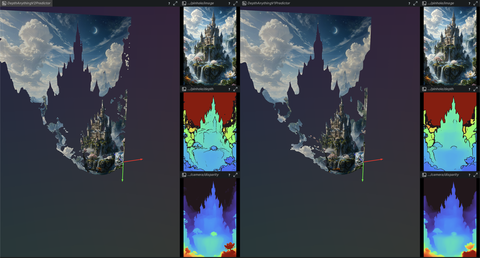
Depth compare
Depth Compare allows for easy comparison between different depth models, both metric and scale + shift invariant. There has been a recent flurry of monocular depth estimation networks, and often the only method of comparison is a 2D depth image. This does not provide the full scope of how well a depth network performs in reality. Depth Compare allows for 3D back-projection of the depth image into world space, along with outputting the point cloud to give a better understanding.
2D 3D HuggingFace Depth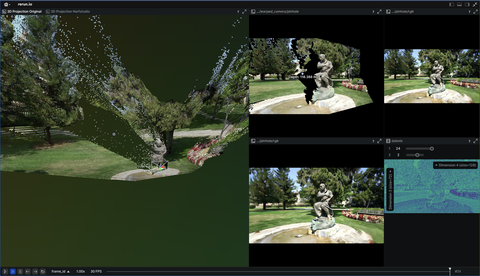
Mini NVS solver
Mini NVS Solver is a minimal implementation of NVS Solver. This method explores Video Diffusion Models as a Zero-Shot Novel View Synthesizer. Given a single image, multi-image, or dynamic video and a chosen camera trajectory, NVS Solver can generate the image frames of the camera on said trajectory using stable diffusion video and the warped input views.
2D 3D HuggingFace Depth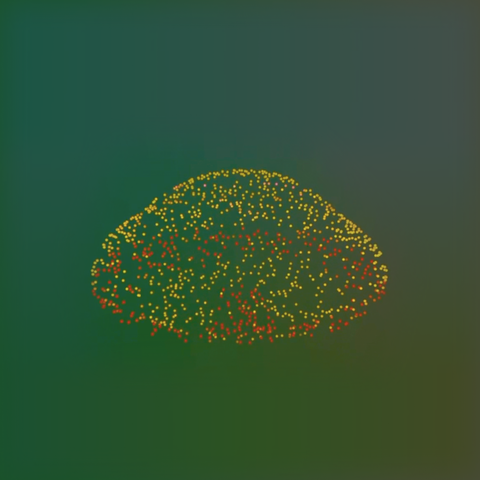
Point-E and Shap-E
This example is a visual comparison of two popular text-to-3D methods that uses Rerun to compare the generation process and results.
3D Diffusion Point Mesh
LLM embedding-based named entity recognition
Visualize the BERT-based named entity recognition (NER) with UMAP Embeddings.
LLM Embeddings Classification Hugging Face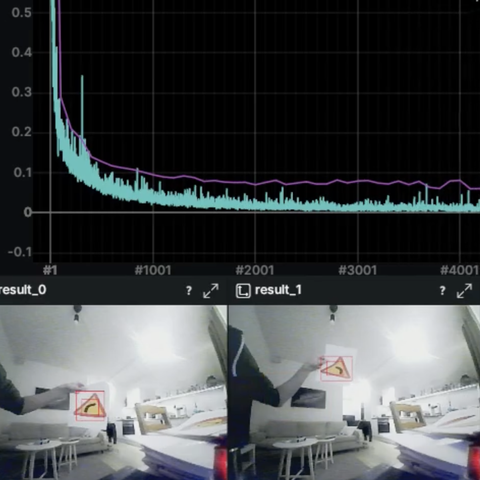
TFRecord loader
This is an example importer plugin that lets you view a TFRecord of Events (i.e., Tensorboard log files). It uses the external importer mechanism to add this capability to the Rerun Viewer without modifying the Viewer itself.
2D Tensor Loader Time series
Vision
Inspect every pixel, every frame
Detections, segmentations, keypoints, and depth, overlaid on the source video, synchronized in time, and ready to scrub. Built for the messy reality of perception work.
 Live
LiveSegment anything model
Example of using Rerun to log and visualize the output of Meta AI's Segment Anything model.
2D SAM Segmentation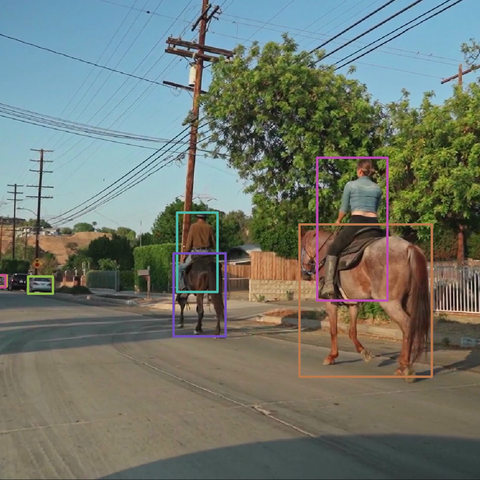 Live
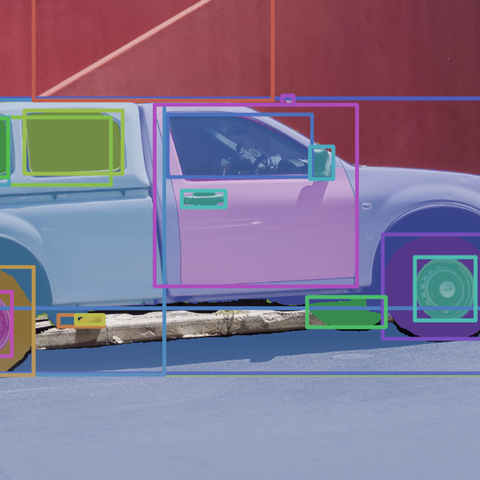
LiveDetect and track objects
Visualize object detection and segmentation using the Huggingface's Transformers and optical flow tracking from OpenCV.
2D Hugging face Object detection Object tracking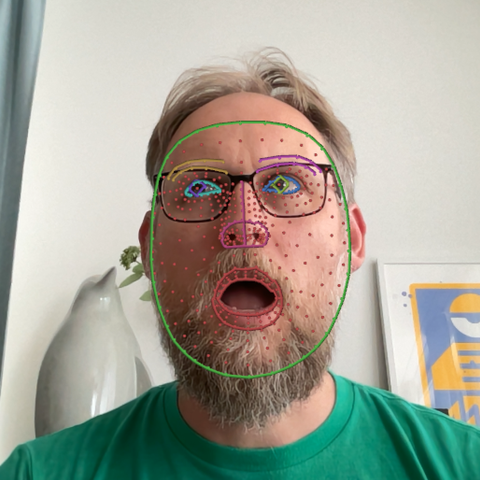
Face tracking
Use the MediaPipe Face Detector and Landmarker solutions to detect and track a human face in image, video, and camera stream.
2D 3D Camera Face tracking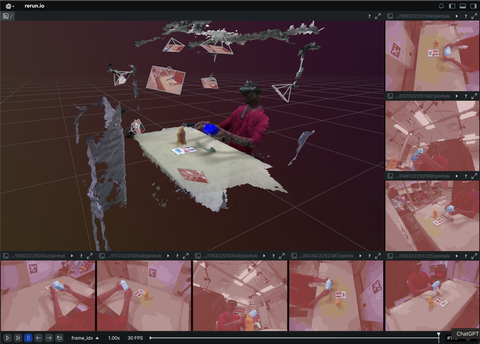
Interactive 3D annotation app with Rerun and Gradio
This example showcases how to use Rerun with gradio to generate an annotation app. It consists of two different modes both of which leverage Segment Anything 2.
2D 3D Pinhole camera Time series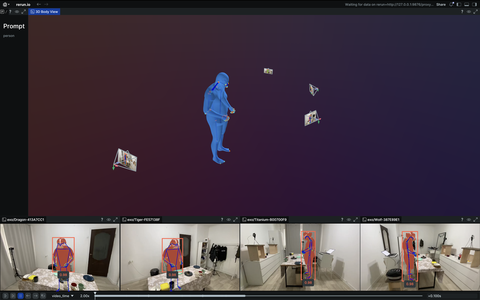
SAM 3D body: robust Full-Body human mesh recovery
SAM 3D Body is a promptable model for single-image full-body 3D human mesh recovery (HMR) from Meta. This example showcases an unofficial playground with promptable SAM3 masks and live Rerun visualization, using Gradio for the UI and Pixi for one-command setup.
3D Human mesh Body tracking Single-view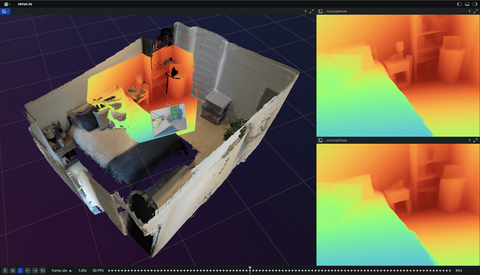
Depth compare
Prompt Depth Anything builds on DepthAnythingV2 by leveraging a low-resolution “prompt” depth map captured from an iPhone LiDAR along with its corresponding image to generate metric depth maps at resolutions up to 4K. This approach benefits applications that require high-resolution, metric, and multi-view consistent depth — such as 3D reconstruction and generalized robotic grasping. In this example, you can use the output from a raw Polycam scan to produce high-resolution depth maps for downstream applications.
2D 3D Lidar Depth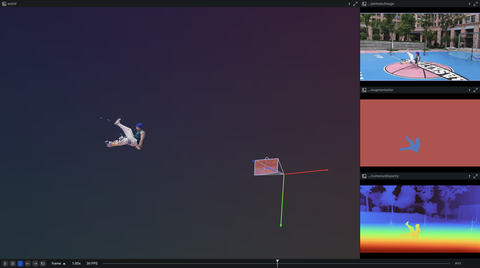
Sam2 + DepthAnything2
Segment Anything 2 is follow up work on Segment Anything, that extends the state of the art segmentation capabilities into videos. This is done by adding a per session memory module that captures information about the target object in the video. This allows SAM 2 to track the selected object throughout all video frames, even if the object temporarily disappears from view, as the model has context of the object from previous frames. Depth Anything 2 is a monocular depth estimation model trained on a large amount of synthetic data and real data to achieve state of the art depth estimation. The two models are combined to allow tracking an object in 3D from just a single monocular video!
2D 3D HuggingFace Depth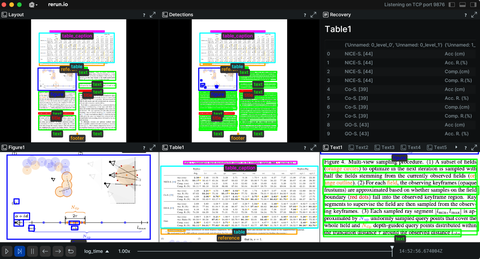
PaddleOCR
This example visualizes layout analysis and text detection of documents using PaddleOCR.
Text OCR 2D Blueprint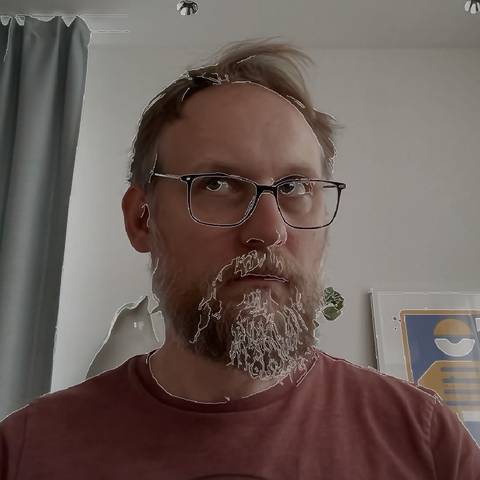
Live camera edge detection
Visualize the OpenCV Canny Edge Detection results from a live camera stream.
2D Canny Live OpenCV
TAPIR: tracking any point with per-frame initialization and temporal refinement
Tracking any point in a video is a fundamental problem in computer vision. The paper “TAPIR: Tracking Any Point with per-frame Initialization and temporal Refinement” by Carl Doersch et al. significantly improved over prior state-of-the-art.
2D Point tracking Time series Tensor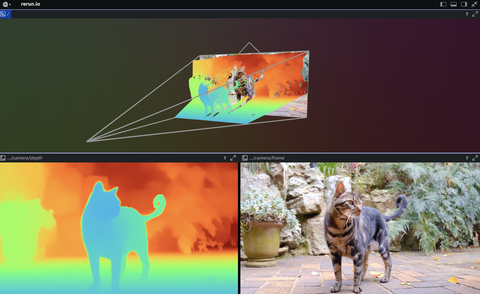
DepthPro
This example visualizes the paper "Depth Pro: Sharp Monocular Metric Depth in Less Than a Second" (arXiv). The example runs inference for each frame in the provided video, and logs the predicted depth map to Rerun.
2D 3D HuggingFace Pinhole camera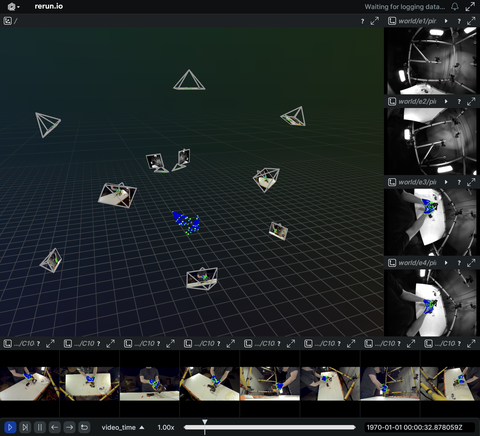
EgoExo forge
A collection of datasets and tools for egocentric and exocentric human activity understanding, featuring hand-object interactions, manipulation tasks, and multi-view recordings.
3D HuggingFace Egocentric Exocentric
3D reconstruction
From images to geometry, transparently
SLAM, structure-from-motion, photogrammetry, Gaussian splatting. Watch the pipeline build the scene step by step, with every intermediate inspectable.
 Live
LiveRaw mesh
Demonstrates logging of raw 3D mesh data (so-called "triangle soups") with simple material properties and their transform hierarchy.
Mesh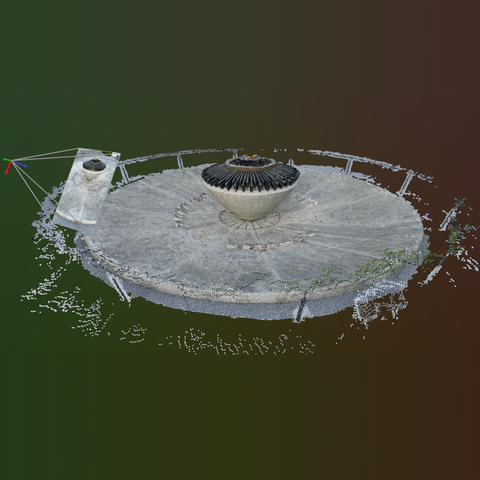 Live
LiveOpen photogrammetry format
Uses pyopf to load and display a photogrammetrically reconstructed 3D point cloud in the Open Photogrammetry Format (OPF).
2D 3D Camera Photogrammetry Live
LiveStructure from motion
Visualize a sparse reconstruction by COLMAP, a general-purpose Structure-from-Motion (SfM) and Multi-View Stereo (MVS) pipeline with a graphical and command-line interface
2D 3D COLMAP Pinhole camera-
KISS-ICP
Visualizes the KISS-ICP LiDAR odometry pipeline on the NCLT dataset.
3D Point cloud Lidar 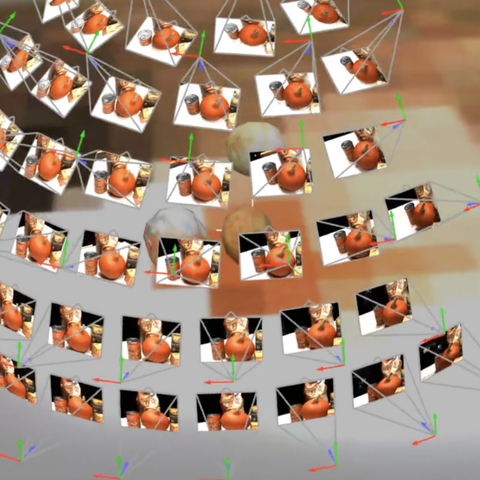
Differentiable blocks world: qualitative 3D decomposition by rendering primitives
This example is a visual walkthrough of the paper "Differentiable Block Worlds". All the visualizations were created by editing the original source code to log data with the Rerun SDK.
3D Mesh Pinhole camera Paper walkthrough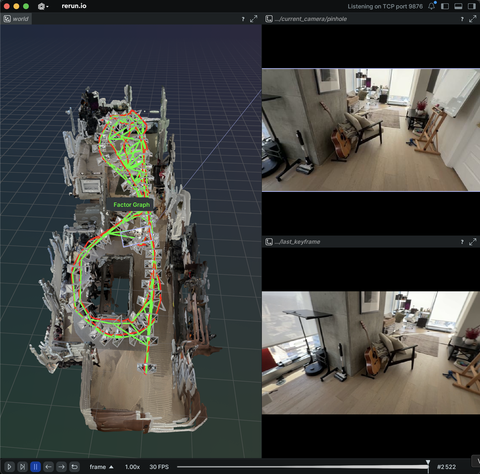
Mast3r slam - real-time dense slam with 3D reconstruction priors
Mast3r-slam is a realtime monocular slam system that is based on Mast3r, a two view 3D reconstruction and matching prior. Equipped with this strong prior, the system is robust on in-the-wild video sequences despite making no assumption on a fixed or parametric camera model beyond a unique camera center. It introduces efficient methods for pointmap matching, camera tracking and local fusion, graph construction and loop closure, and second-order global optimization. With known calibration, a simple modification to the system achieves state-of-the-art performance across various benchmarks.
2D 3D Pinhole camera Time series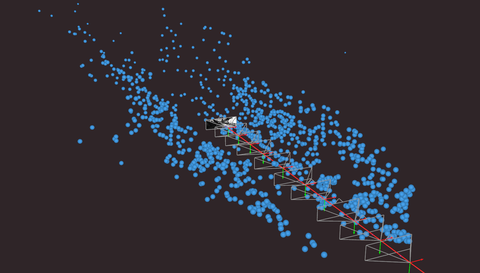
Stereo vision SLAM
Visualizes stereo vision SLAM on the KITTI dataset.
3D Point cloud C++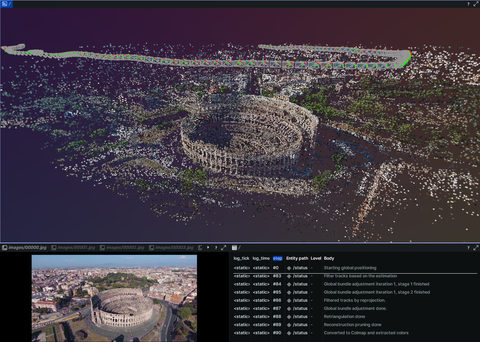
GLOMAP
GLOMAP is a general purpose global structure-from-motion pipeline for image-based sparse reconstruction. As compared to COLMAP it provides a much more efficient and scalable reconstruction process, typically 1-2 orders of magnitude faster, with on-par or superior reconstruction quality. In the video we see it's global positioning step where it performs a joint global triangulation and camera position estimation starting from a randomly initialized state.
3D Point cloud GLOMAP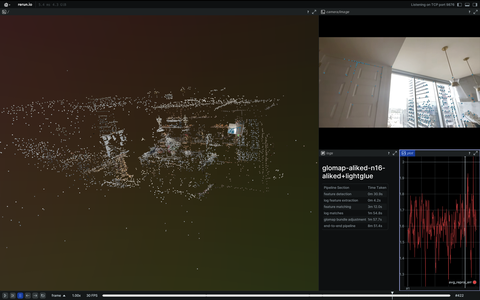
Hierarchical-Localization and GLOMAP
This examples allows use of the Hierarchical-Localization (hloc) repo and GLOMAP for easy and fast Structure-from-Motion with deep learned features and matchers. The Hierarchical-Localization repo (hloc for short) is a modular toolbox for state-of-the-art 6-DoF visual localization. It implements Hierarchical Localization, leveraging image retrieval and feature matching, and is fast, accurate, and scalable. This codebase combines and makes easily accessible years of research on image matching and Structure-from-Motion. GLOMAP is a general purpose global structure-from-motion pipeline for image-based sparse reconstruction. As compared to COLMAP it provides a much more efficient and scalable reconstruction process, typically 1-2 orders of magnitude faster, with on-par or superior reconstruction quality.
2D 3D COLMAP Pinhole camera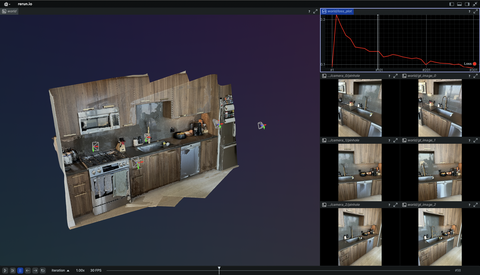
InstantSplat
InstantSplat is a sparse-view, SfM-free framework for large-scale scene reconstruction method using Gaussian Splatting. It allows for extremely fast reconstruction by using Dust3r, a multiview stereo network, to initialize camera poses and dense point cloud for all training views. To enhance pose accuracy and tune scene parameters a gradient-based joint optimization framework from self-supervision is used. By employing this simplified framework, InstantSplat achieves a substantial reduction in training time, from hours to mere seconds, and demonstrates robust performance across various numbers of views in diverse datasets
2D 3D HuggingFace Pinhole camera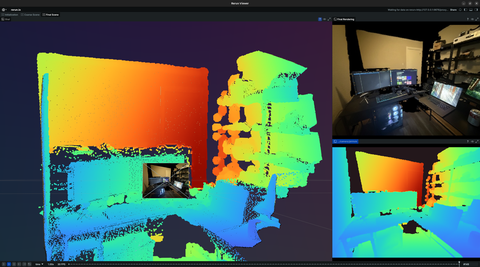
VistaDream: sampling multiview consistent images for single-view scene reconstruction
VistaDream is a novel framework for reconstructing 3D scenes from single-view images using Flux-based diffusion models. This implementation combines image outpainting, depth estimation, and 3D Gaussian splatting for high-quality 3D scene generation, with integrated visualization using Rerun.
3D Reconstruction Pinhole camera Diffusion
Integrations
Plug Rerun into the tools you already use
ROS bridges, MCAP and rosbag readers, notebook embedding, custom dataloaders. Rerun meets your stack where it lives.
 Live
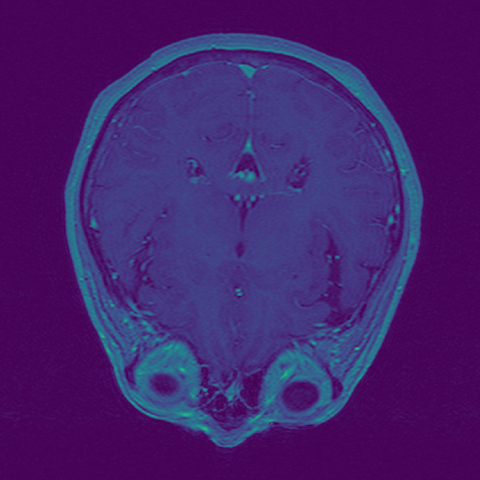
LiveDicom MRI
Visualize a DICOM MRI scan. This demonstrates the flexible tensor slicing capabilities of the Rerun viewer.
Tensor MRI DICOM-
ROS node
A minimal example of creating a ROS node that subscribes to topics and converts the messages to Rerun log calls.
2D 3D Pinhole camera ROS -
ROS 2 bridge
A proof-of-concept Rerun bridge for ROS 2 that subscribes to all supported topics and visualizes the messages in Rerun.
2D 3D Pinhole camera ROS -
ROS bridge
A proof-of-concept Rerun bridge for ROS 1 that subscribes to all supported topics and visualizes the messages in Rerun.
2D 3D Mesh Pinhole camera 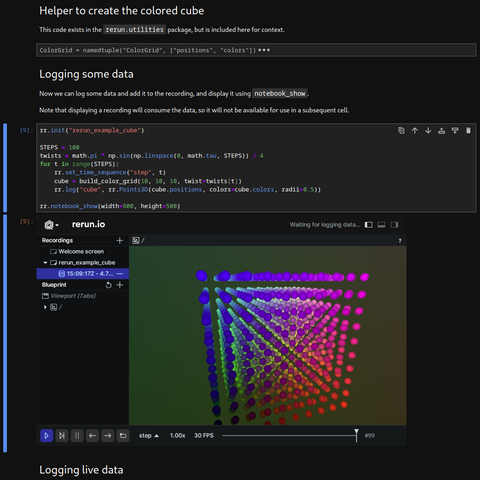
Notebook: minimal example
Rerun can be used directly within Jupyter notebooks. Many additional environments beyond Jupyter are supported such as Google Colab or VSCode.
Notebook API example 3D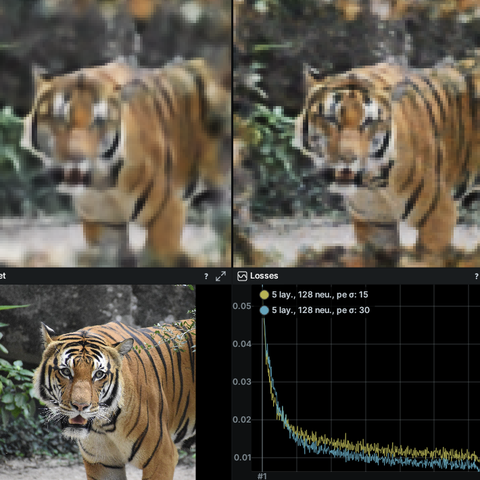
Notebook: 2D neural fields
Rerun can be used directly within Jupyter notebooks. Many additional environments beyond Jupyter are supported such as Google Colab or VSCode.
Notebook Neural Field 2D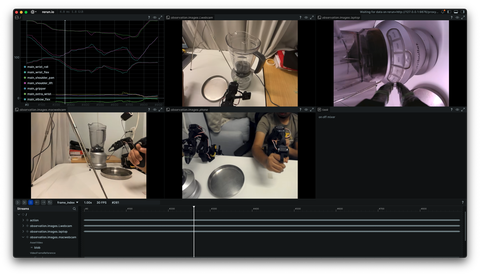
LeRobot loader
Rerun has a built in importer to visualize LeRobot datasets.
2D Video Loader Hugging Face-
VRS viewer
This is an example that shows how to use Rerun's C++ API to log and view VRS files.
2D 3D VRS Viewer 
Revy - Rerun integration for Bevy
Revy is a proof-of-concept time-travel debugger for the Bevy game engine, built using Rerun.
2D 3D Gamedev Bevy-
TFRecord loader
This is an example importer plugin that lets you view a TFRecord of Events (i.e., Tensorboard log files). It uses the external importer mechanism to add this capability to the Rerun Viewer without modifying the Viewer itself.
2D Tensor Loader Time series 
Eigen and OpenCV C++ integration
This is a minimal CMake project that shows how to use Rerun in your code in conjunction with Eigen and OpenCV.
2D 3D C++ Eigen
Stock charts
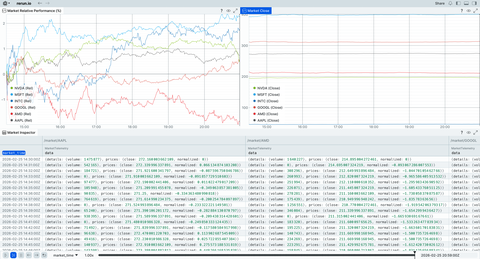
This example fetches the last 5 days of stock data for a few different stocks. We show how Rerun blueprints can then be used to present many different views of the same data.
Time series Blueprint-
ARFlow: a framework for simplifying AR experimentation workflow
This is an external project that uses Rerun as a core component.
3D Augmented reality Spatial computing Integration 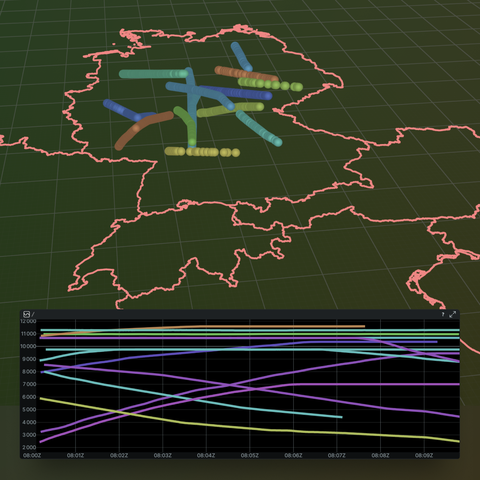
Air traffic data
Display aircraft traffic data
2D 3D map crs-
MCAP
This example demonstrates how to visualize and work with MCAP files in Rerun. From mcap.dev:
MCAP RRD ROS ROS 2 -
ROS TF
ROS 2 uses the transform library, tf2, to track multiple coordinate frames over time. It is a powerful system that allows developers to transform points, vectors, and poses between different frames of reference (e.g., from a "camera_link" to "base_link"). This system makes collaboration between developers around the world easier, as it provides a common language for how transforms should be handled — a topic that can otherwise be defined in many different ways. In Rerun, you can use named transforms to decouple spatial relationships from the entity hierarchy, similar to as it is done in ROS.
ROS TF Transform Coordinate Frame
Features
Recipes for the SDK
Compact, focused snippets that show how individual Rerun features work, handy when you want to learn one thing at a time.
- Live
Any scalar
A 6-minute narrated walkthrough of using the Rerun UI to plot arbitrary scalar data from a dataset (MCAP) is available on Youtube.
Any scalar Plotting DynamicArchetype - Live
IMU signals
Log multi dimensional signals under a single entity.
Plots - Live
Raw mesh
Demonstrates logging of raw 3D mesh data (so-called "triangle soups") with simple material properties and their transform hierarchy.
Mesh 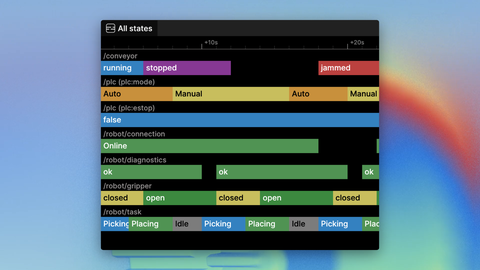 Live
LiveState timeline
This example simulates a robot work cell and demonstrates every feature of the state timeline view.
States API example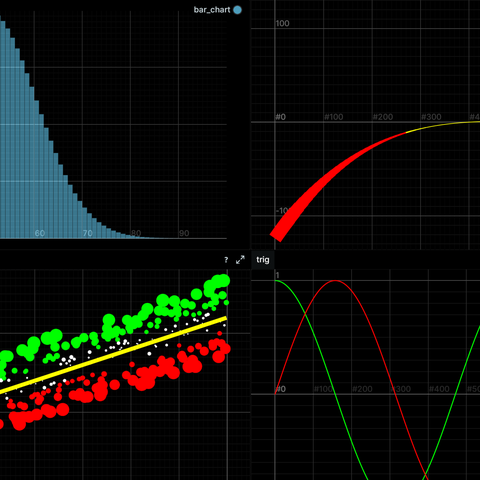 Live
LivePlots
This example demonstrates how to log simple plots with the Rerun SDK. Charts can be created from 1-dimensional tensors, or from time-varying scalars.
2D Plots API example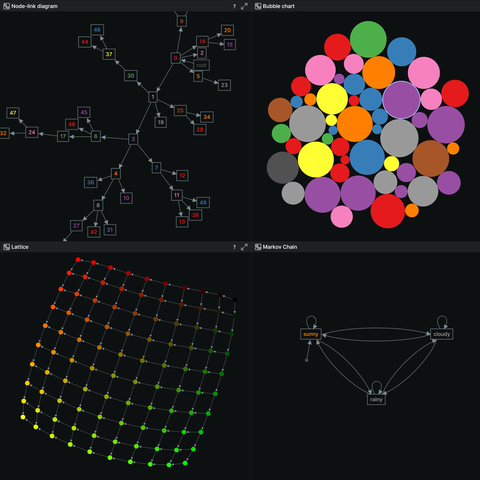 Live
LiveGraphs
This example shows different types of graphs (and layouts) that you can visualize using Rerun.
Graph Layout Node-link diagrams Bubble charts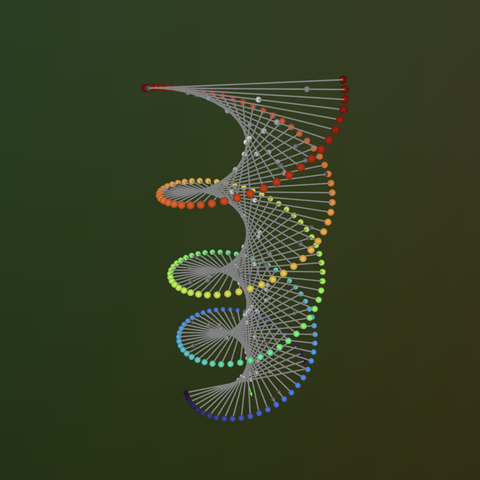 Live
LiveHelix
Simple example of logging point and line primitives to draw a 3D helix.
3D API example-
Notebook: minimal example
Rerun can be used directly within Jupyter notebooks. Many additional environments beyond Jupyter are supported such as Google Colab or VSCode.
Notebook API example 3D 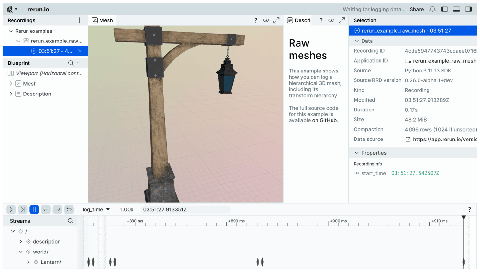
Notebook: viewer
This notebook shows the easiest way to embed the Rerun Viewer widget inside a Jupyter notebook. Instead of logging new data, it loads a pre-recorded .rrd file and renders the scene inline, making it perfect for demos, documentation, or quick inspections of existing captures.
Notebook Widget 3D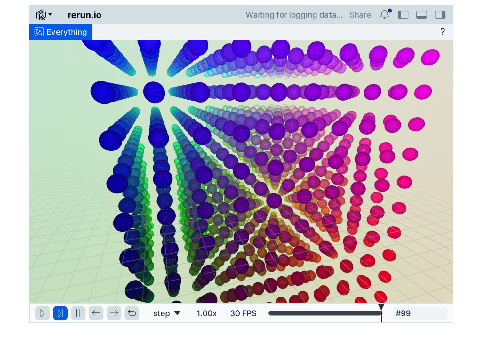
Notebook: viewer callbacks
This notebook demonstrates how to react to user interactions coming from the embedded Rerun Viewer widget. It logs a dynamic 3D point cloud, listens for timeline, time, and selection events, and surfaces them in real time using Jupyter widgets.
Notebook Interactive Callbacks 3D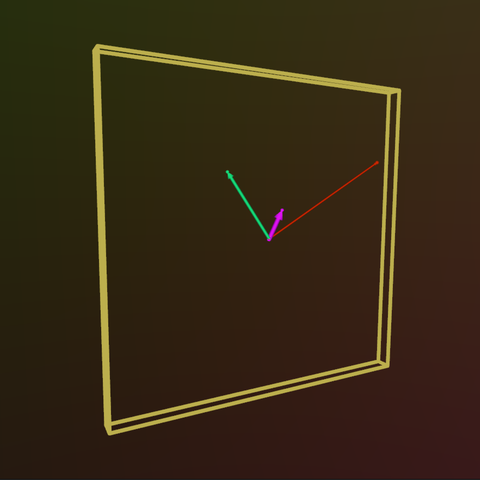
Clock
An example visualizing an analog clock with hour, minute and seconds hands using Rerun Arrow3D primitives.
3D API example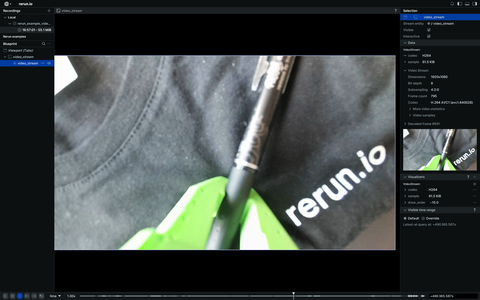
Compressed camera video stream
This example uses pyAV to fetch and encode a video stream to H.264 video and streams it live to the Viewer using the VideoStream archetype
2D Image encoding Video Streaming
Log file
Demonstrates how to log any file from the SDK using the Importer machinery.
API example Loader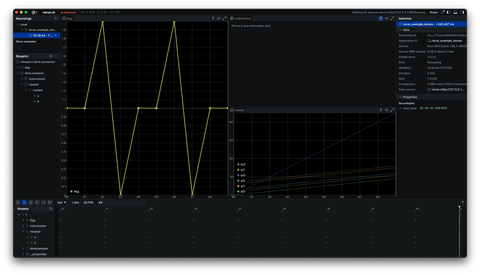
Lenses example
Demonstrates how to use lenses to transform log messages before forwarding them to an underlying sink.
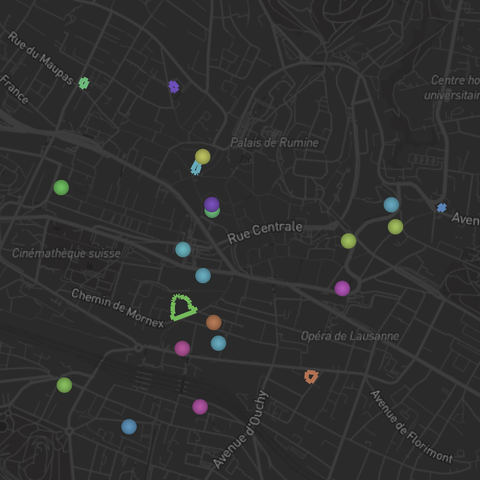
OpenStreetMap data
Download OpenStreetMap data via the Overpass API and query language, and display it on a map view.
Map Blueprint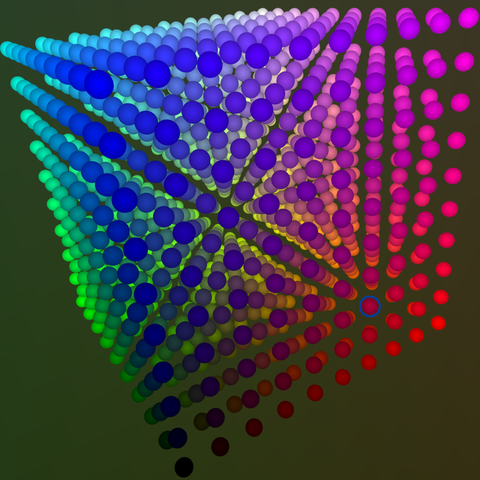
Minimal example
Generates a 3D colored cube and demonstrates how to log a point cloud.
3D API example
Multiprocess logging
Demonstrates how Rerun can work with the Python multiprocessing library.
API example
Multithreading
Demonstration of logging to Rerun from multiple threads.
API example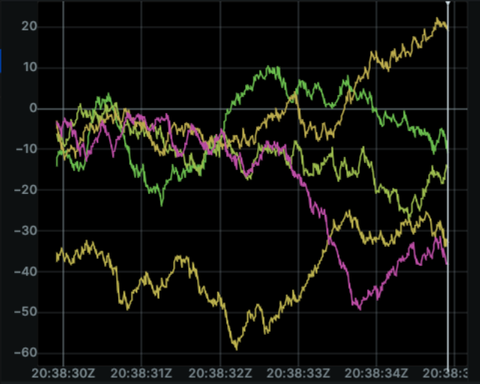
Live scrolling plot
Visualize a live stream of several plots, scrolling horizontally to keep a fixed window of data.
Plots Live-
Air traffic data
Display aircraft traffic data
2D 3D map crs -
Eye control
This example demonstrates how to programmatically configure and control the 3D view camera using the Rerun Blueprint API. By defining camera states in Python, you can precisely tailor your workspace to highlight the most relevant aspects of your data.
Eye control 3D Pinhole camera 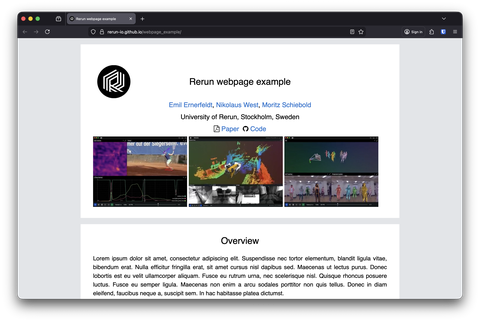
Webpage
Static screenshots and videos belong in the past. In this guide, we will walk through deploying a live, interactive webpage integrated with Rerun. By embedding a hosted Rerun viewer, you are not just showing your results — you are handing your audience the keys to explore your data in 3D, scrub through timelines, and inspect your model's logic in real-time.
Webpage Javascript Web-viewer Tutorial
Ready to log your own data?
Install the SDK in one line, log a few things, and open the viewer.